一、专业概况
本专业面向国防和航天科技发展需求,围绕航天器设计与应用,培养具备创新能力、工程实践能力和国际化视野的高层次航天工程师。追溯到上世纪50年代,本专业的前身是飞行器设计专业,80年代飞行器设计二级学科获得首批博士、硕士学位授予权,90年代电子工程系下设立了“虚”的宇航学院,2006年在江苏省内首先成立了航天学院,开设探测制导与控制技术(航天)和信息工程(航天)等航天类专业方向。随着航天科技的快速发展,传统的航天类专业内涵急需变革,学校通过联合航天领军企业的科教资源,逐步形成改造升级传统航天类专业、建设航空航天工程新工科专业的办学思路。
本专业有三点特色优势:第一,本专业以中国航天领军人物和国家教学名师为引领的一流师资队伍,建成了国家精品在线课程和总师课程等一流课程资源,实现了校企深度融合。第二,本专业以嫦娥工程、火星探测和载人航天等航天重大型号任务为牵引,联合中国空间技术研究院等国际一流科研团队,共建国家和省部级重点实验室,一流工程实践环境为人才培养提供了强有力的支撑。第三,本专业依托国家重点学科航空宇航科学与技术,整合力学、控制和信息等多学科的办学资源,建立了多学科交叉融合的新工科人才培养模式。
二、专业建设的创新举措、特色做法
(一)人才培养模式创新
1.构建航天类课程思政育人模式,传承航天精神,贯彻立德树人
聘请航天领军企业总师为兼职教授,由专业负责人组织开展航天总师思政课,将“自力更生、艰苦奋斗、大力协同、无私奉献、严谨务实、勇于攀登”的航天精神带入第一课堂,践行立德树人根本任务,让学生直观地感受我国航天顶尖科技的发展,将航天精神谱系和航天文化发扬光大,成功打破专业培养和思政德育的“藩篱”,为培养未来航天领军人才打下坚实的基础。
2.校企协同育人,推进新工科平台建设,完善航天人才培养体系
依托火星应急信标装置、嫦娥三/五号巡视器和着陆器、载人航天着陆缓冲装置等航天重大任务,与航天五院508所等单位签订了战略合作协议,共建教学实践平台,由航天总师和我校教授共同建设企业课程,联合乌克兰国立航空航天大学(以下简称“哈航”)持续开展“2+2”联合培养,完善了航天人才的培养体系。
90%学生在校企协同育人平台进行工程实践与生产实习,150名国内高校学生在江苏省暑期学校结业,122名“中乌班”本科毕业生获得南航-哈航双学士学位,其中免试升学比例高达95%。培养了一批具备国际化视野、专业基础扎实和通晓俄语的航天工程师。
(二)教学模式改革
1.整合航天类课程群,建设新工科“金课”,实现跨学科交叉培养
在国家级教改项目“多学科交叉复合的航空航天特色新兴工科专业建设探索与实践”的支持下,制定了“4L-3S-1F”新工科培养方案,整合了多学科交叉的航天类课程群,重点建设新工科“金课”。以天文学及行星科学为基础,结合航天器系统工程理论,开设了《航天天文学》和配套的《航天天文学观测与实验设计》实践课程;以计算机科学为基础,结合理论力学和现代控制理论,出版省部级教材《多轴系统动力学与控制》,并开设同名配套课程;结合航天系统工程对总体型人才培养的需求,开设了《航天器总体设计》课程,并辅助配套《结构振动分析与测试》《空间载荷紧密驱动综合实验》《空间环境探测实验》等多门实践课程。
《航天、人文与艺术》课程入选国家教学精品课程及精品视频公开课(中国大学慕课网累计选课人数6.9万),《微机原理与接口技术》获国家级规划教材,控制和电子技术等课程获江苏省教学成果奖3项。
2.建立多元化考核方案,注重场景任务驱动的学习过程管理,激发学生学习潜能
依托校企合作育人平台,将航天场景任务融入课堂,引导学生主动发现、分析与解决工程问题。通过学生互评、本科生导师和课程组评价,实现多元化学习过程考核。训练学生的系统思维,构筑学生的底线思维,培养学生的创新思维。学生在各类竞赛中取得优异成绩,共获得国家及省部级奖励百余项,育人成果显著。
(三)教学团队建设
1.依托国家级教学科研平台,加强师资队伍建设
积极引培高层次师资,建立国家教学名师定期授课和优秀教师课程观摩等“传帮带”机制,优化教学团队结构。现有专任教师66人,其中中科院院士1人、国家杰青1人、国防卓青1人、“万人计划”青尖1人、国家青千1人、省部级人才12人次、外籍教师3人、航天型号总师任兼职教授15人,教授上课率100%,工业和信息化部研究型教学创新团队1个。
2.强化基层教学组织体系,积极开展教育教学研究活动
实施专业负责人制,组建航天动力学与控制、航天器结构与机构、空间有效载荷与探测课程组,健全基层教学组织。广泛开展“三课一评”教学研究和“五教一备”研讨活动。课程评估优良率100%,学生满意度95%。桌面卫星模拟系统获得第五届全国高等学校教师自制教学仪器设备创新大赛一等奖,承担“面向新工科建设的教师跨界发展与评价机理机制探索与实践”等国家级教学改革项目3项。
3.坚持立德树人,加强师德师风建设
弘扬高尚师德,不断提高教师思想政治素质,设立教学业绩激励机制,加强师德师风模范教师宣传。10余人次获得教学优秀奖和我最喜爱的导师等荣誉称号,无师德师风失范和学术不端问题。
(四)教学质量保障建设
1.建立校企协同育人平台组织运行管理机制
针对校企育人平台,签订了《校企协同育人平台协议》,制定了《校企协同育人管理办法》,设立了平台管理办公室,通过校企督导,实现协同育人平台的过程管理,全面保障校企协同育人的教学质量。
2.完善教育教学管理制度、教学质量监督与评价机制
在专业教学指导委员会的指导下,建立完善的教学管理制度,明确各个环节的质量要求。在教学质量监督与评价机制的基础上,建立“四位一体”教学过程质量监控体系,实现专业教育质量的有效保障和教学各个环节质量监控和常态化评价。
3.注重校内外评价结果的综合分析
定期对校内外的评价结果进行综合分析,将评价结果计入教师个人教学能力评估系统,作为职称晋升及评优评奖的重要依据。对于教学能力特别突出和具备高超课堂教学艺术的教师,建立教学型教师高级职称晋升制度,激发教师的教学激情。
4.健全毕业生持续跟踪反馈机制
组织开展毕业生建言献策座谈会、暑假走访学生所在用人单位、邀请校友开展交流研讨;依托学校就业指导服务中心、江苏省招就中心开展毕业生问卷调查;建立毕业生追踪反馈数据库,实现对专业建设全过程的实时监控、预警和调控。
三、专业建设成效
(一)天问二号附着与采样分系统
针对小天体表面引力微弱、地形地貌非确知非结构性的特点,设计了一款仿生爪刺附着采样装置,如图1所示。该装置可通过可控机械臂或其他方式安装在小天体着陆器上,为小天体探测器提供附着锚固与采样功能。
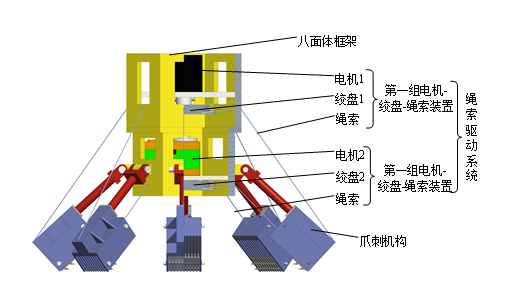
图1 仿生附着采样装置整机构型示意图
仿生爪刺附着装置采用三点式分布,如图2所示。当着陆器靠近目标行星后,附着装置由收拢状态展开,接触到目标行星时,装置末端的爪刺机构随即收拢,将着陆器与目标行星紧紧附着到一起。在着陆器与目标行星稳定附着在一起后,装载在着陆器上的推进机构开始工作,将目标行星与着陆器一同推向预定轨道,从而完成小行星资源采集任务。
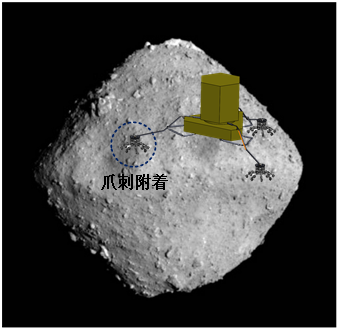
图2 仿生爪刺附着采样装置工作示意图
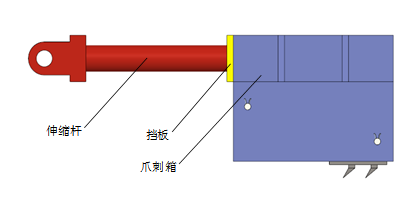
爪刺机构是附着装置为整个着陆器提供锚固力的关键部件,通过转轴与销链接在主体框架上,依靠绳索驱动装置完成收拢展开动作。爪刺机构主要包括伸缩杆、挡板、爪刺箱三个部分,如图3所示。
经仿真验证,优化后锚固力整体优于优化前且平均提升33%,最大锚固力提升了28.77N,如表1所示,证明了各设计变量对爪刺机构抓附力的影响效果分析结果的可靠性。优化后的单个爪刺单元最大锚固力为85.2N,整个装置的的锚固力超过200N,可以满足对小行星附着采样探索的需求。
表1 优化前后锚固力对比表
接触角度/° | 48 | 53 | 58 | 62 | 66 | 70 | 74 | 78 |
优化前/N | 56.434 | 55.391 | 36.149 | 15.114 | 8.134 | 4.13 | 3.871 | 2.221 |
优化后/N | 85.2 | 61.325 | 39.631 | 20.582 | 10.701 | 5.629 | 3.881 | 4.316 |
增长幅度/N | 28.766 | 5.934 | 3.482 | 5.468 | 2.567 | 1.499 | 0.01 | 2.095 |
增长百分比 | 50.97% | 10.71% | 9.63% | 36.18% | 31.56% | 36.30% | 0.26% | 94.33% |
(二)空间站在轨测质系统
针对空间站的质量测量装置更高精度的测量需求,开发了一款适用于失重环境的在轨质量测量装置,如图4所示,具体完成的工作如下:
1.有源多模式在轨质量测量装置结构设计:确定了测质装置的功能要求和设计指标,提出了本文有源多模式在轨测质的技术方案,对在轨质量测量装置进行了详细的结构化设计。
2.在轨测质装置的动力学特性研究:基于装置的几何参数构型,构建了不同分析场景下装置的动力学模型并求解,建立了在不同参数条件下质量与周期的映射关系,并得出了质量计算的理论公式,通过误差分析提出了被测物安装失误的分析方法,通过结构有限元分析,验证了测质装置关键结构满足运动形变的要求。
3.基于“信号分解-特征提取-重构验算”过程的振动信号处理算法设计,选择了最合适的方法。对信号分解结果进行自相关计算,并得到了振动信号和周期结果的计算方法。计算了重构函数与原函数和分解函数的相关性系数和p值,验证了振动信号处理结果的准确性。
4.多模式有源在轨测质电磁阻尼有限元分析和地面实验系统设计:建立了电磁阻尼与电流大小的映射关系,优化了关键结构参数,设计了一套地面实验平台,并计算了在该实验系统下的动力学装置修正模型。
研究结果表明,该多模式有源在轨质量测量装置理想工况下能够完成质量测量,且当被测物质量为100kg时,测量误差小于0.84kg,小于被测物原始质量的5%。该测质装置具备快速可重复测量以及运动参数可调节等功能,增加了可测量工况数量,为空间站在轨质量测量需求提供了一种可靠方案。
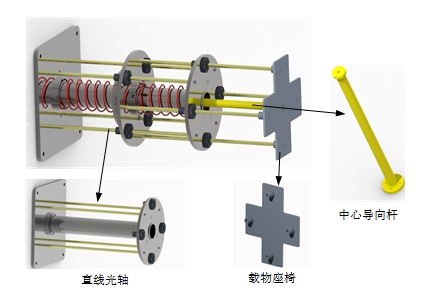
图4 在轨质量测量装置